
Can we have a social robot to monitor child safety in crowded pool?
Link to the final prototype demo:

Source: Original photo created in Figma
Drowning is actually the third leading cause of unintentional injury deaths globally, accounting for about 7% of all injury-related deaths. With this in mind, me and my team members, decided to build a robot especially for kids in swimming pools, as part of our Human Robot Interaction class.
Introduction
Drowning is a process that occurs when a person’s airway becomes submerged in water or other liquid, preventing them from breathing. When this happens, the person’s body cannot get enough oxygen, and they can quickly become unconscious and die. Drowning can happen in any body of water, from a pool to a river to the ocean, and it can happen to anyone, regardless of age or swimming ability.
Drowning is actually the third leading cause of unintentional injury deaths globally, accounting for about 7% of all injury-related deaths. The global burden and death from drowning are found in all economies and regions, however, low- and middle-income countries account for over 90% of unintentional drowning deaths with children below age of are at the highest risk. (Drowning, 2021).
Additionally, many swimming pools and beaches might not have access to trained lifeguards who can monitor and rescue people that are drowning, making this problem all the more complicated. When children are swimming, lifeguards, parents or other adult supervisors have to be all the more alert and watchful, but that cannot always be possible.
“Drowning happens so quickly and so quietly, we cannot expect people to be robots and machines and never lose sight of children for three, four, five straight hours”, said Eyal Golan, the CEO of Coral Detection Systems (Robot Lifeguards?, 2020). With advancements in technology, we believe that better tools can be built to assist lifeguards and other adult supervisors in monitoring child safety in pools. This is where robots can come in handy. They can monitor pools and beaches, assist lifeguards and conduct autonomous rescue operations if needed.
With drowning detection as our primary motivation, our team began exploring the domain of rescue robots.
Literature Review
Since our motivation was to help people in distress, we started reading about rescue robots and how they have been used in real life rescue situations.
Artifact Analysis
We identified the following interesting robots in our literature review and did artifact analysis to get inspired to do both the design and think-act-plan features for our robot body:
1. 3ELISA
A team of German researchers developed this aquatic robot which aims to assist lifeguards and rescue swimmers in underwater emergencies using its autonomous system. Surveillance cameras mounted on the beach track the movement patterns and position of the drowning person, and send the coordinates to the robot. This makes the robot reach the destination, locate the endangered person and carry them to the surface. We found this mechanism of bringing a potentially unsafe swimmer to safety very intriguing, and thought of shifting the safety perspective from the beach to a regular swimming pool.

Fig 1. Source: (An Autonomous Underwater Robot Saves People from Drowning, 2021)
2. SARBOT
This shoebox-sized sub is remotely operated and was used to salvage shipwrecks by a Seattle based robotics company before being utilized in drowning detection. The robot primarily transmits sonar and video data to land via a cable. Rescuers then use the sub’s arm to latch onto a victim and haul both him and the robot in, and everything can happen within 5 minutes. The time factor is very crucial in such sensitive cases, and this is what we also kept in mind while designing our robot later in the project.

Fig 2. Source: (“SARbot Robo-Sub Helps Rescue Drowning Victims in Minutes,” 2011)
3. CORAL MANTA
Made by Israeli firm Coral Detection Systems, it uses artificial intelligence to identify a person who might be drowning. So if the unit sees a motionless head beneath the surface for above 15 seconds, a high-pitched alarm notifies lifeguards and attendants. The system also connects to mobile devices, which in turn alert users or lifeguards remotely if the alarm gets triggered. We thought making a sound alarm for our robot was a great idea, after reading about this.

Fig 3. Source: (Robot Lifeguards?, 2020)
4. FLYING ROBOT UAV
This search and rescue (SAR) robot prototype can be used in forest rescue operations, and it can do so by being fully autonomous which can be very useful in densely occluded forests. In the course of 17 field experiments conducted over various forest types and under varied flying conditions, the drone found 38 out of 42 hidden persons. As a result, we got the idea of experimenting with our robot prototype in different conditions for testing too, ranging from a swimming pool, a bathtub and a water container — to test its initial effectiveness.

Fig 4. Source: (Setiawan et al., 2017)
Algorithmic Analysis
We also looked into relevant algorithms that we could incorporate into our robot prototype
YOLO (You Only Look Once)
It is an algorithm that uses neural networks to provide real-time object detection and can be used by our robot to differentiate between an object and a human being. The dataset is available on Kaggle’s open source project. [14] We were inspired to use it in case our robot needs to monitor underwater for potential drowning human beings.

Fig 5. YOLO Technique of residual blocks differentiating between various elements in a scene
APF (Artificial potential field)
Using this algorithm, a bot can avoid collision with fixed obstacles and can reach the target in an optimal path, without any problems by avoiding obstacles, so that the robot does not get stuck in a particular area and can reach the person needing help in the water area. [14] We thought this algorithm framework would be helpful for getting quickly to the person in need during crucial times, and can be used in synchrony with the YOLO algorithm.
Design Research
Methods: Observations and semi-structured interviews
Observations at the SRSC Swimming Pool- 10/6/2022Our goal for observing the SRSC swimming pool was to get a general understanding of how lifeguards perform their job and also observe their behavior. Some behaviors of the lifeguards that we were able to note were how they scanned the pool every couple of minutes. They were also keeping an eye on the swimmers while they were swimming and watched them when they went into the deep end of the pool. From our observations, we noticed that the lifeguards always stayed pretty alert while they were on duty even though they didn’t have much to do.

Fig 6. One of the lifeguards is in alert mode as the swimming practice for an upcoming competition are going on one side and beginner swimmers are on the other end of the pool.
Interviews
Interview 1- Lifeguard at the SRSC Swimming PoolFor this interview, we went to the SRSC centre’s swimming pool area, as this was an easily available resource in our campus and we wanted a first hand narrated experience of a lifeguard. The lifeguard there was very helpful in giving his insights and we noticed how he was always alert whenever someone jumped into the pool. We conducted a semi-structured interview with him by asking him questions and ice-breakers from our interview protocol and plan formed from the design research proposal. Some of the most important takeaways were:
- The rescue time inferred from our primary research was 1 minute, however for trained lifeguards, it’s supposed to be 30 s, which reduces our emergency response time.
- There had been very few almost drowning incidents in the pool in two years. However, the common theme we found was during break times/shift changes. Additionally, all of them were saved thankfully.
- As a lifeguard at the SRSC, he felt the need for a robot might arise in case of crowded times of the day but in the larger pool/beach setting. Here at SRSC, he felt it would be helpful to have an assistive robot who can do post-rescue operations like CPR methods etc. Also since they have to act fast, it is difficult to be gentle in their approach, a robot assistant can help in fixing any muscle pulls/potential damages to any body parts or recognising it by analyzing instant scanning, so that the appropriate treatment can be deployed on the person immediately by a doctor/taken to the hospital. This will ensure both rescue and safety of that particular individual.
Interview 2 — Durgakant Pushp at the MESH Lab
For this interview, we interviewed Durgakant Pushp, a PHD student who was part of the research team for the underwater robot. In this interview, we discussed topics that are important for a robot when detecting certain things. Some things we should consider include an exploration algorithm which is the first step for robot detection. Some things to make note of when doing an exploration algorithm is to check the water flow and the water quality. It is also important to know the depth of the area you are covering and figure out how your robot can move in that particular area. The robot should also detect when there are obstacles to face because you want to keep the robot safe from the obstacles. Some important robot functions to make use out of include ultrasonic sensors and cameras for detection. One way to know if a person is drowning is if the person is making sudden active movements and then stops making movement. It is important to detect that sudden motion because it can help us know if that person is drowning.

Fig 7. Autonomous underwater vehicle or AUV by IU’s VAIL (Vehicle Autonomy and Intelligence Lab)
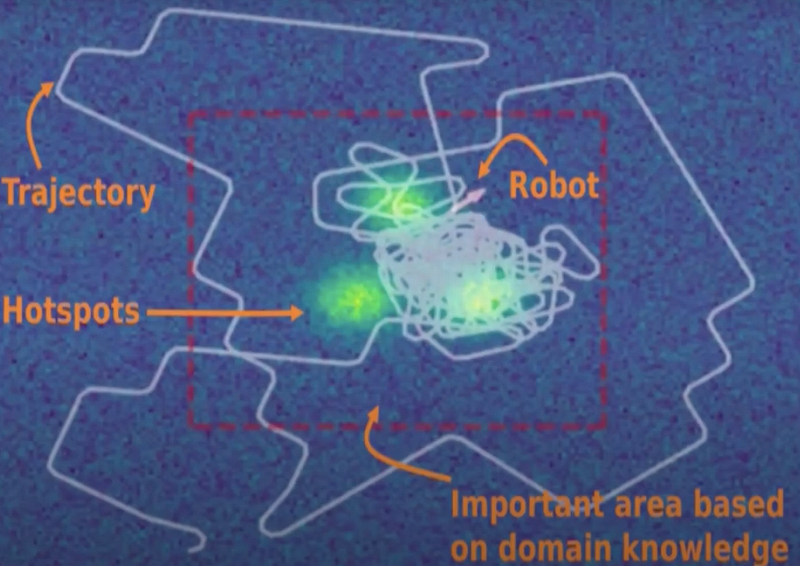
Fig 8. The collision detection and trajectory formation algorithm developed for these autonomous vehicles
Interview 3 — Lifeguard at Monroe County YMCA Pool
For this interview, we spoke to a lifeguard who had worked at the YMCA Pool during summer’ 2023. By conducting a semi-structured interview, we were able to learn that a lifeguard’s experience completely depended on the type of users who frequented the pool. At the YMCA, there was a vast difference in the ages (4–70 years) and abilities of swimmers. The main takeaways from this interview are listed below :
- In addition to the pool, lifeguards are also responsible for patrons safety in the overall pool area, including the pool deck.
- Drowning is not restricted to novice swimmers alone. When experienced swimmers get tired, pull muscles / strain themselves, they are also susceptible to drowning.
- Lifeguards observe the pool by sitting on the high chair and walking on the edges of the pool (This is done to check for blind spots and to have a closer look under water).
- Lifeguards communicate to swimmers and other lifeguards (possibly in the breakroom) through their whistle.
- The interviewee felt that she would like assistance, especially when the pool is crowded and there are a lot of children. It is hard to keep track of everyone when there are a lot of people (<20) and activity.
- Lifeguards are trained to reach all areas of the pool within 30 seconds and initiate a rescue.
- The interviewee found that she repeatedly had to ask children to stop sliding and running across the pool deck. Since the pool deck was slippery, many children would fall and hurt themselves. They were also encouraged not to jump/ do flips into the pool. There was a risk of them hitting the bottom of the pool, since they were in the shallow end.
Primary Research Findings
Pain Points and Opportunity Space Directions
- Hard to monitor all swimmers when the pool is crowded (20+swimmers).
- Hard to monitor multiple activities taking place at the same time in the pool area.
- Need to be extremely alert when there are a lot of children swimming.
- Assistance with CPR and other medical help post rescue from drowning.
- Pool has blind spots, making it difficult to observe some parts.
Possible Design Directions
We converted the pain points discovered through our primary research into possible design directions for our robot.
- A robot that monitored the underwater part of the pool, allowing lifeguards to monitor the above water part of the pool.
- A robot that worked with the lifeguard to identify the blind spots in the pool and monitored them.
- A robot that actively encouraged children to act responsibly in the pool area.
- A robot that assisted the lifeguard in CPR and post-rescue activities.
- A robot that alternated eye gaze with lifeguards (The robot monitors the left side of the pool, while the lifeguard monitored the right side of the pool and vice versa) — to ensure that all areas of the pool were monitored at all times.
Context of Use
Our robot’s context of use is swimming pools. We are looking to create a robot that can collaborate with lifeguards and can alert them to people that are drowning. We hope to create a simple, universal solution that can be deployed across swimming pools across the world.
People Involved
Our stakeholders are lifeguards, swimming coaches and people who are just learning to swim. We will use the Aquatics Center at Indiana University’s SRSC to reach out to all our stakeholders.
Tasks Involved
We used the Literature Review to answer the following questions :
- What signs do you use to detect that people are drowning?
- Please describe your rescue process.
- Are there critical times by which people have to be rescued?
- What are some challenges involved in detecting that people are drowning?
- What are some challenges involved in rescuing people who are drowning?
- What are some operations where you think help through technology is needed?
Prototype Design and Iteration
From our initial statement of ‘How might we design an affordable robot that can identify people that are drowning and alert the lifeguard by navigating to them?’, we decided to add another layer to it i.e ‘We need to design an affordable rescue robot for monitoring the blind spots in crowded swimming areas when its hard for the lifeguard to keep a check. Additionally we want our robot to act as an assistant to the lifeguard in terms of relaying repetitive instructions to young swimmers like kids and make it a more engaging and fun experience for them as well. The latter is because we don’t just want it to be functional, but social too.
Final Design Concept
Following our initial concept generation, we received feedback on each of our concepts. It became clear to us that having underwater cameras complicates the design and implementation of the prototype. Waterproofing the robot and all of its components was already a challenge and so we started to look at alternate ways we could use to detect that a swimmer was in distress (or) drowning.
Jalalifar et al. discuss a smart multi sensor device to detect swimmers in distress in their research paper. The proposed device comprises four main components, including heart rate, blood oxygen level, movement, and depth sensors. The data obtained from the sensors were sent to a microcontroller that compared the input data to adjustable threshold values to detect dangerous situations. Being in hazardous situations for more than a specific time activated the alarming system [19].
We redesigned our flamingo floatie concept to work with the sensor system discussed by Jalalifar et al. The design process of the latest iteration is discussed below.
KLARE (Kids’ Lifeguard Assistant Robot) and arm band

Fig 16. Original pictures captured in Student Recreational Sports Center (SRSC)
About KLARE
It is a flamingo-shaped robot that works along with an armband to monitor child safety in swimming pools. KLARE is meant to be an extra set of eyes in the pool, to assist adult supervisors in detecting children who are distressed and at risk of drowning.
Implementation scenario
Imagine a public YMCA swimming pool, where a lot of people come to swim: young children and elderly novices and expert swimmers. The lifeguard in such a scenario, has to monitor multiple events happening both inside the pool and on the pool deck area, and young children are specifically mischievous. It is extremely hard to be alert at all times especially when the pool is crowded.
The Mechanism
- Children in the pool wear an armband that contains a pulse sensor, a pressure sensor, and a bluetooth module.
- When a child is in distress and is struggling to breathe, the sensors are triggered and KLARE is alerted via Bluetooth to the GPS coordinates of the child. KLARE then moves to the GPS location, and positions itself near the child while sounding an alarm.
- This alerts the lifeguard and anyone nearby that a child is in danger. Then the lifeguard can jump into action to rescue/provide assistance to the child, since they know where to go, based on KLARE’s location.
The crucial aspect here is that all lifeguards follow a 10/20 rule — spot a person in trouble in 10s and reach him/her in those 20s. So if a child is motionless underwater for 5 seconds, KLARE will alert the lifeguard by a loud beeping sound
Designing and Assembling the Prototype

Fig 17. Original snapshots of the parts made by us in the Myles Brand’s Makerspace Lab.
The final prototype had 3 major parts:
- Wheels : Two wheels were designed, mimicking water turbines to help the robot move in water. The wheels are attached to DC motors that rotate the wheels forward.
- Body : The body is a cuboid that houses all the Arduino controllers, sensors, battery, and motors. The body has two circular holes cut out through which the motors are attached to the wheels.
- Head and Neck: The head and neck are fabricated with care to resemble a real flamingo. The neck is flexible and allows for movement. The head is fitted with two large googly eyes that give life to the robot. The head and neck were sourced from Cults 3d online resource [21].
All of these parts were 3D printed and then assembled together to form a singular unit.
Social aspects of KLARE
1. It will not be perceived as a hindrance in the pool because as stated earlier, kids are used to friendly Flamingo floaties in the swimming pool.
2. The facial features including its goofy & big eyes make KLARE look approachable and curious.
Components used to build KLARE’s functionality
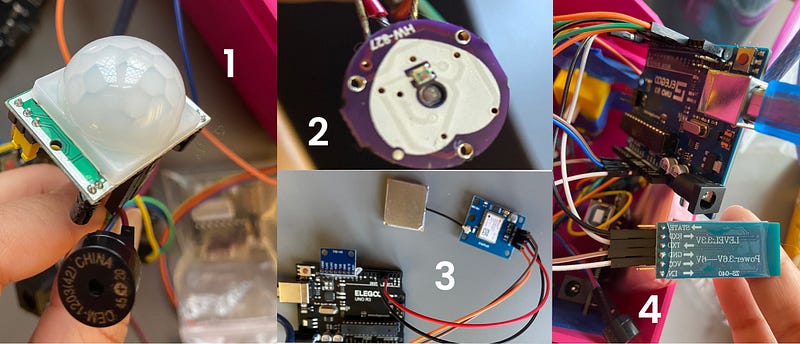
Fig 18. Original pictures captured of KLARE’s parts: PIR motion sensor and buzzer (1), Pulse sensor (2), GPS module and Arduino UNO (3), Bluetooth module (4)

Fig 19. Original figure created by the team.
After the 3D printing and component assembly, we conducted initial tests to check the functionality of the robot, including movement and stability tests.
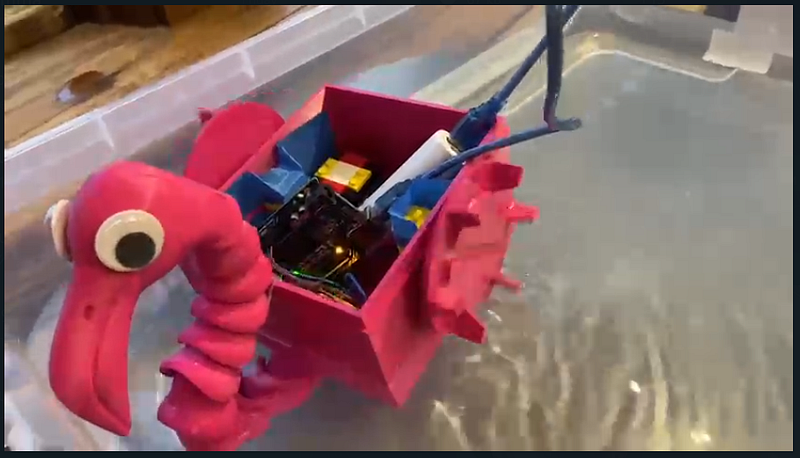
Fig 20. Original snapshot of KLARE in a plastic tub container.
Once the robot’s stability and movement in water were satisfactory, we tested the functioning of the buzzer/alarm system and the PIR Motion sensor’s sensitivity to motion (flailing hands in our case)
Video link to KLARE’s Demonstration in the HRI final showcase: Click here
Here, a swimmer shouts help and KLARE moves towards her direction and raises an alarm.

Fig 21. Original pictures taken at the SRSC pool area with Gaby the lifeguard and KLARE
User Evaluation
A user evaluation study was conducted with a lifeguard at the SRSC pool at Indiana University. Our goal was to understand the lifeguard’s impression of the robot and its perceived usefulness. Using data gathered from the user evaluation, we will be analyzing the design of our robot prototype and making improvements.
Method
The lifeguard watched the robot in action performing the following activities:
- Monitoring the pool
- Responding to a swimmer in distress
After this, the robot was given to the lifeguard for her to take a closer look. She was then invited to a 10-minute-long unstructured interview. The questions were tailored around sensory perception, usage, and functionality of the robot.
Feedback
Summarized below is the participant’s own thoughts about our robot KLARE.
Sensory Perception: This looks so cute! I think kids will perceive it as a toy.
Usage: I definitely see myself using this — especially at the outdoor pool at IU. It gets really crazy there in the summers. Knowing that there’s an extra set of eyes monitoring the pool.
Functionality: I’m pretty happy with the way it functions now, I can’t think of anything else I would like to add to it.
Based on her feedback, it is evident that there is an overwhelmingly positive response to our robot. We also acknowledge the concerns that the participant shared and will be conducting more user evaluation studies with both lifeguards and swimmers, especially children to validate our findings.
Future Work
Based on the feedback from user evaluation and our own critical analysis of the current prototype, our future work on the prototype will be focused on,
Prototyping Possible Scenarios: We will prototype several scenarios that could commonly occur in swimming pools and try to understand how the presence of our robot will affect such situations. This will help us analyze different social situations that our robot will encounter.
Robot Social Behavior: Our prototype in its current state is only equipped with functional behavior mechanisms. Based on our learning from the previous step, we will design additional social behaviors for our robot to embody. For instance, we think it might be interesting if our robot nodded to acknowledge swimmers in its path.
Object Detection and Avoidance: We will work on improving the object detection and avoidance capabilities of our robot. This will ensure that the robot can detect boundaries of the pool, humans as well as other objects in the pool and not bump into them.
Waterproofing: For larger bodies of water like Olympic sized swimming pools, our robot will have to stay afloat for longer periods of time. Even though the current prototype works well and is fairly waterproof is small bodies of water, we will work on improving the robustness of the robot and it’s waterproofing.
Ethical Considerations and Social Design Changes
1. For our project design, we have identified an ethical concern of potential abuse towards the robot, since the flamingo floatie KLARE will be in the pool all the time and kids might try to be mischievous with it and ‘hurt’ it. Everytime a kid tries to poke it, we will make the flamingo speak “Ouch, please don’t do that! I am your friend’. This is deceiving but it will help the kids be more empathetic towards the robot and treat it as their companion in water. [16]
2. The ethical implication of supplementing rather than replacing human care is another thing that caught our eye, as even with our project design of the lifeguard assistant, KLARE will just be assisting the human lifeguards. It will not be replacing humans in terms of making the final action of saving a child from potential drowning in the pool. [15]
3. We feel that trusting a system always involves accepting some kind of risk, and believing that the risk will be limited. Similarly for our robot, moving towards the kid in danger of drowning according to the sensor signals of the wristband attached to him/her, is the primary goal. The parents who go for a bathroom break or lifeguards who are doing a shift change, would need to rely to a certain extent on our robot to help lessen the risk in the situation and save the kid from potential drowning in their absence. Thus in the future iterations of our robot, we would allow the floatie to lift the kid out of the pool or ask the kid to hold onto the floatie if he/she feels sick in any way while swimming. [18]
4. In terms of determining privacy concerns for our project’s lifeguard robot — a flamingo floatie KLARE (Kids’ Lifeguard Assistant Robot) — we analyzed that if we use a camera to detect the kids’ faces and their potential drowning movements (like the climbing ladder action), the data will be saved with us. [15]
We could either assure the kids’ parents that we would sign a contract with all of them that we wouldn’t sell this data to any external companies, or delete this data daily. But this would be more complicated as we would want the computer vision algorithms (YOLO — You Only Look Once) to continually improve with the potential drowning data it sees everyday in a swimming pool full of kids and save more lives. Thus after getting feedback from our helpful teaching team and peers, we decided to skip using cameras and focus on using existing wristbands that children wear to a swimming pool. We would comply with the current privacy laws valid with it, and the floatie will send an alarm to the lifeguard, indicating which kid is in danger, based on the band’s stress sensor and heartbeat sensing capacity. [17]
UPDATE: KLARE won at Cheng Wu 2023
KLARE got a funding of $9000 and we couldn’t have been more proud of Cheng Wu, as competitions like these encourages students like us to use tech to address compelling problems in the society: https://news.luddy.indiana.edu/story.html?story=Innovative-Concepts-Highlight-Cheng-Wu-Innovation-Challenge
Source: Luddy News, 2023


Bibliography 1. G. A. Wilde and R. R. Murphy, “User Interface for Unmanned Surface Vehicles Used to Rescue Drowning Victims,” 2018 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), 2018, pp. 1–8, doi: 10.1109/SSRR.2018.8468608. 2. K. Ravimuni, & K. Usha Rani. (2021). Demographic Profile of Deaths Due to Drowning in and Around Vijayawada, Andhra Pradesh. Indian Journal of Forensic Medicine & Toxicology, 16(1), 670–676. https://doi.org/10.37506/ijfmt.v16i1.17571 3. Lei, F., Zhu, H., Tang, F., & Wang, X. (2022, January 3). Drowning behavior detection in swimming pool based on deep learning. Signal, Image and Video Processing, 16(6), 1683–1690. https://doi.org/10.1007/s11760-021-02124-9 4. J. -X. Jian and C. -M. Wang, “Deep Learning Used to Recognition Swimmers Drowning,” 2021 IEEE/ACIS 22nd International Conference on Software Engineering, Artificial Intelligence, Networking and Parallel/Distributed Computing (SNPD), 2021, pp. 111–114, doi: 10.1109/SNPD51163.2021.9704884. 5. Young, C. (2021, March 5). New Robot Lifeguard Will Save People from Drowning. IE. Retrieved September 23, 2022, Interesting Engineering 6. Elmansy, R. (2022, August 6). The Double Diamond Design Thinking Process and How to Use it. Designorate. Retrieved September 23, 2022, from https://www.designorate.com/the-double-diamond-design-thinking-process-and-how-to-use-it/ 7. An autonomous underwater robot saves people from drowning. (n.d.). Fraunhofer-Gesellschaft. Retrieved September 23, 2022, from https://www.fraunhofer.de/en/press/research-news/2021/march-2021/an-autonomous-underwater-robot-saves-people-from-drowning.html 8. Drowning. (n.d.). Retrieved September 23, 2022, from https://www.who.int/news-room/fact-sheets/detail/drowning 9. Robot lifeguards? Lehigh Valley YMCA pilots artificial intelligence system to help prevent drownings. (n.d.). The Morning Call. Retrieved September 23, 2022, from https://www.mcall.com/news/local/mc-nws-easton-ymca-ai-drowning-prevention-20200305-s3mhtrqyzrcc3i3mmdr7aljmhm-story.html 10. SARbot Robo-Sub Helps Rescue Drowning Victims in Minutes. (2011, February 9). Popular Science. https://www.popsci.com/technology/article/2011-01/sarbot-robo-sub-helps-rescue-drowning-victims-minutes/ 11. Setiawan, R. J., Suryanto, I., Latif, I., Billah, N., & Widyasti, A. (2017). Flying Robot based UAV as a Monitoring and Surveillance System in the Coastal Areas. Symposium on Innovation and Creativity (iMIT-SIC), 351–354. 12. Vehicle Autonomy and Intelligence Lab. (n.d.). Retrieved October 7, 2022, from https://vail.sice.indiana.edu/pages/research.html 13. yolo-coco-data. (2019, July 20). Kaggle. https://www.kaggle.com/datasets/valentynsichkar/yolo-coco-data 14. Rostami, S. M. H., Sangaiah, A. K., Wang, J., & Liu, X. (2019). Obstacle avoidance of mobile robots using modified artificial potential field algorithm. EURASIP Journal on Wireless Communications and Networking, 2019(1). https://doi.org/10.1186/s13638-019-1396-2 15. Laurel D. Riek, & Don Howard. (2014). A Code of Ethics for the Human-Robot Interaction Profession. Social Science Research Network. [http://papers.laurelriek.org/a-code-of-ethics-for-the-human-robot-interaction-profession-riek-howard.pdf](http://papers.laurelriek.org/a-code-of-ethics-for-the-human-robot-interaction-profession-riek-howard.pdf) 16. The Conference / Media Evolution. (2016, January 14). Kate Darling — Ethical issues in human-robot interaction | The Conference 2015 [Video]. YouTube. [https://www.youtube.com/watch?v=m3gp4LFgPX0](https://www.youtube.com/watch?v=m3gp4LFgPX0) 17. Bartneck, C., Belpaeme, T., Eyssel, F., Kanda, T., Keijsers, M., & Šabanović, S. (2020). Human-robot interaction: An introduction. Cambridge University Press. 18. 4. Malle, B. F., & Ullman, D. (2021). A multidimensional conception and measure of human-robot trust. Trust in Human-Robot Interaction, 3–25. https://doi.org/10.1016/b978-0-12-819472-0.00001-0 19. Jalalifar, S. (n.d.). A Smart Multi-Sensor Device to Detect Distress in Swimmers. MDPI. https://www.mdpi.com/1424-8220/22/3/1059 20. ARTICULATED FLAMINGO. (2022, July 28). Cults 3D. https://cults3d.com/en/3d-model/art/articulated-flamingo
- 1. G. A. Wilde and R. R. Murphy, “User Interface for Unmanned Surface Vehicles Used to Rescue Drowning Victims,” 2018 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), 2018, pp. 1–8, doi: 10.1109/SSRR.2018.8468608.
- 2. K. Ravimuni, & K. Usha Rani. (2021). Demographic Profile of Deaths Due to Drowning in and Around Vijayawada, Andhra Pradesh. Indian Journal of Forensic Medicine & Toxicology, 16(1), 670–676. https://doi.org/10.37506/ijfmt.v16i1.17571
- 3. Lei, F., Zhu, H., Tang, F., & Wang, X. (2022, January 3). Drowning behavior detection in swimming pool based on deep learning. Signal, Image and Video Processing, 16(6), 1683–1690. https://doi.org/10.1007/s11760-021-02124-9
- 4. J. -X. Jian and C. -M. Wang, “Deep Learning Used to Recognition Swimmers Drowning,” 2021 IEEE/ACIS 22nd International Conference on Software Engineering, Artificial Intelligence, Networking and Parallel/Distributed Computing (SNPD), 2021, pp. 111–114, doi: 10.1109/SNPD51163.2021.9704884.
- 5. Young, C. (2021, March 5). New Robot Lifeguard Will Save People from Drowning. IE. Retrieved September 23, 2022, Interesting Engineering
- 6. Elmansy, R. (2022, August 6). The Double Diamond Design Thinking Process and How to Use it. Designorate. Retrieved September 23, 2022, from https://www.designorate.com/the-double-diamond-design-thinking-process-and-how-to-use-it/
- 7. An autonomous underwater robot saves people from drowning. (n.d.). Fraunhofer-Gesellschaft. Retrieved September 23, 2022, from https://www.fraunhofer.de/en/press/research-news/2021/march-2021/an-autonomous-underwater-robot-saves-people-from-drowning.html
- 8. Drowning. (n.d.). Retrieved September 23, 2022, from https://www.who.int/news-room/fact-sheets/detail/drowning
- 9. Robot lifeguards? Lehigh Valley YMCA pilots artificial intelligence system to help prevent drownings. (n.d.). The Morning Call. Retrieved September 23, 2022, from https://www.mcall.com/news/local/mc-nws-easton-ymca-ai-drowning-prevention-20200305-s3mhtrqyzrcc3i3mmdr7aljmhm-story.html
- 10. SARbot Robo-Sub Helps Rescue Drowning Victims in Minutes. (2011, February 9). Popular Science. https://www.popsci.com/technology/article/2011-01/sarbot-robo-sub-helps-rescue-drowning-victims-minutes/
- 11. Setiawan, R. J., Suryanto, I., Latif, I., Billah, N., & Widyasti, A. (2017). Flying Robot based UAV as a Monitoring and Surveillance System in the Coastal Areas. Symposium on Innovation and Creativity (iMIT-SIC), 351–354.
- 12. Vehicle Autonomy and Intelligence Lab. (n.d.). Retrieved October 7, 2022, from https://vail.sice.indiana.edu/pages/research.html
- 13. yolo-coco-data. (2019, July 20). Kaggle. https://www.kaggle.com/datasets/valentynsichkar/yolo-coco-data
- 14. Rostami, S. M. H., Sangaiah, A. K., Wang, J., & Liu, X. (2019). Obstacle avoidance of mobile robots using modified artificial potential field algorithm. EURASIP Journal on Wireless Communications and Networking, 2019(1). https://doi.org/10.1186/s13638-019-1396-2
- 15. Laurel D. Riek, & Don Howard. (2014). A Code of Ethics for the Human-Robot Interaction Profession. Social Science Research Network. [http://papers.laurelriek.org/a-code-of-ethics-for-the-human-robot-interaction-profession-riek-howard.pdf](http://papers.laurelriek.org/a-code-of-ethics-for-the-human-robot-interaction-profession-riek-howard.pdf)
- 16. The Conference / Media Evolution. (2016, January 14). Kate Darling — Ethical issues in human-robot interaction | The Conference 2015 [Video]. YouTube. [https://www.youtube.com/watch?v=m3gp4LFgPX0](https://www.youtube.com/watch?v=m3gp4LFgPX0)
- 17. Bartneck, C., Belpaeme, T., Eyssel, F., Kanda, T., Keijsers, M., & Šabanović, S. (2020). Human-robot interaction: An introduction. Cambridge University Press.
- 18. 4. Malle, B. F., & Ullman, D. (2021). A multidimensional conception and measure of human-robot trust. Trust in Human-Robot Interaction, 3–25. https://doi.org/10.1016/b978-0-12-819472-0.00001-0
- 19. Jalalifar, S. (n.d.). A Smart Multi-Sensor Device to Detect Distress in Swimmers. MDPI. https://www.mdpi.com/1424-8220/22/3/1059
- 20. ARTICULATED FLAMINGO. (2022, July 28). Cults 3D. https://cults3d.com/en/3d-model/art/articulated-flamingo